










DOBOT Magician EDU Bundle - for teaching Coding, Robotics, 3D Printing



Couldn't load pickup availability

Dobot Magician Robotic Arm, Including Vac pump, Gripper, 3D Print Kit & Joystick
- 3D Printing
- Handhold Teaching
- Writing & Drawing
- Graphical Programming
Push the boundaries of human-machine cooperation.
Introducing the all in one robotic arm that brings the power and precision of industrial robotics to your desktop. This cutting edge robotic arm can manipulate objects, 3D print, write an draw. The Dobot Magician is a highly precise, four axis, robotic arm for the modern educator, researcher, engineer, or maker. It uses a graphical programming environment and can work with an Arduino platform. With Dobot's includes tutorials and lesson plans to teach students, robotics, hardware development and automation.
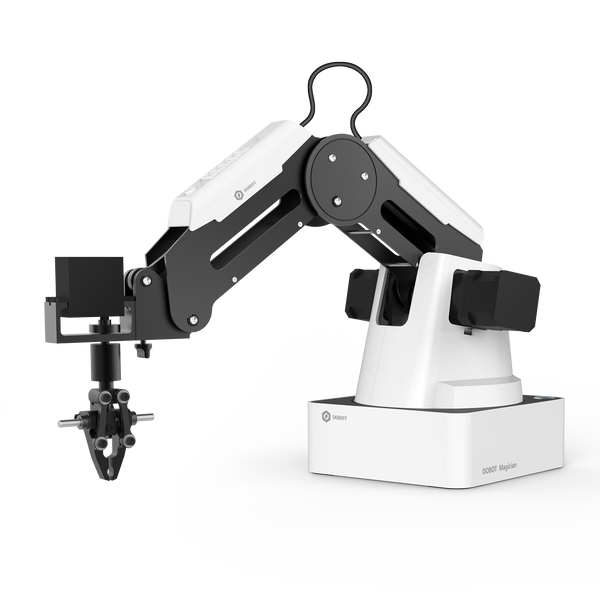
With a sleek design and an easy to use interface, the Dobot Magician is ready to be used by people of all ages in whatever field they want, be it drawing a picture, decorating a cake, 3D printing, or seizing the means of production. The Dobot has four hot swappable tools that allow you to modify the robot for whatever tasks you need, combining that with four axis of movement gives you a robot that can only be described as... Flexible.
Cross-subject learning toolDobot Magician is an integration of programming, mechanics, electronics, and automation. It’s a great STEM /STEAM teaching device that strengthens knowledge across multiple subjects, through a high precision and user-friendly UI, enjoyable functions, and unlimited developing possibilities. Dobot Magician’s immersive and explorative experience increases interest in science and technology. With expansion ports mounted on the arm and base of the robot, there is no limitation to what you can do or create!
The Dobot Magician comes with the Dobot Studio software, allowing you to realise full control of your Dobot, with the power to teach Dobot a skill using; brain EEG control, PC or app interfaces, Leap motion, gesture control, voice control, vision command, Google blocky, or python. If that's not enough, you can teach Dobot to repeat an action by physically moving the robot and letting it record the motions to repeat.
Download a copy of the Dobot Manual Here
- Dobot Magician
- Suction cup
- Vacuum Gripper
- Bluetooth module
- Writing and drawing kit
- 3D printing kit
- Wi-Fi module
- Joystick control kit
- Number of Axes: 4
- Payload: 500 g
- Max. Reach: 320mm
- Position Repeatability (Control): 0.2 mm
- Communication: USB /WIFI */ Bluetooth
- Power Supply: 100V - 240 V, 50/60 Hz
- Power In: 12 V / 7 A DC
- Consumption: 60W Max
- Working Temperature: -10°C-60°C
- Net Weight: 3.4KG
- Gross weight ( Standard Version): 7.2KG
- Gross weight ( Education Version): 8.0KG
- Base Dimension(Footprint): 158mm × 158mm
- Materials: Aluminum Alloy 6061, ABS Engineering Plastic
- Controller: Dobot Integrated Controller
- Robot Mounting: Desktop
- Packing Size (L × W × H): 307mm × 224mm × 330mm
- Carton Size (L × W × H): 345mm × 290mm × 485mm
- Software: DobotStudio, Repetier Host, GrblController3.6, DobotBlockly (Visual Programing editor)
- SDK (Software Develop Kit): Communication Protocol, Dobot Program Library
- I/O × 10 (Configurable as Analog Input or PWM Output)
- Controllable 12V Power output × 4
- Communication Interface (UART, Reset, Stop, 12V, 5V and two I/O included)
- Stepper × 2
- Joint 1 base:
- Range: -135° to +135°
- Max Speed(250g workload): 320° / s
- Joint 2 rear arm:
- Range: 0° to +85°
- Max Speed(250g workload): 320° / s
- Joint 3 forearm:
- Range: -10°to +95°
- Max Speed(250g workload): 320° / s
- Joint 4 rotation servo:
- Range: +90° to -90°
- Max Speed(250g workload): 480° / s
- Print Size (L × W × H): 150 mm ×150 mm × 150mm
- Material: PLA
- Resolution: 0.1mm
- Pen Diameter : 10mm
- Cap Diameter: 20mm
- Pressure: -35 Kpa
- Range: 27.5mm
- Drive Type: Pneumatic
- Force: 8N


